လေးလံသော ဝန်အားအတွက် 4D shuttle စနစ်များ
ဖော်ပြချက်
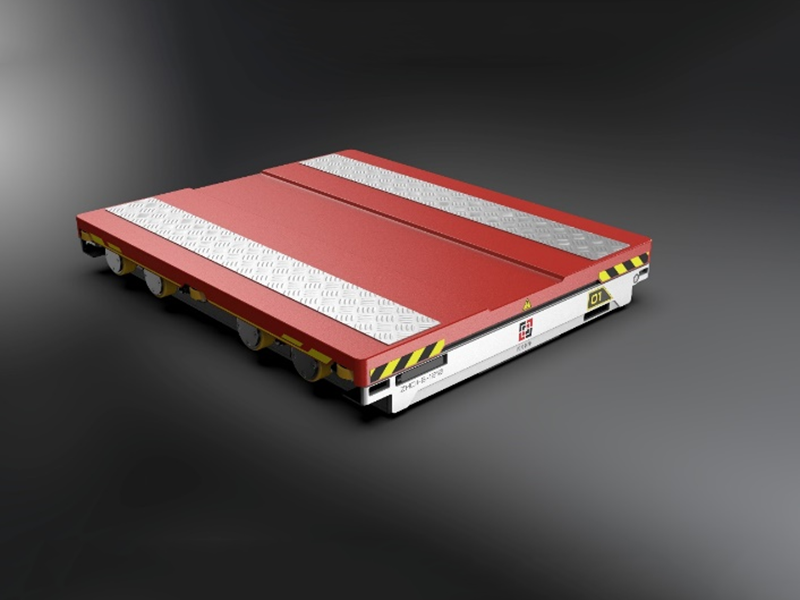
ဉာဏ်ရည်ထက်မြက်သော သိပ်သည်းသိုလှောင်မှုစနစ်၏ အဓိကပစ္စည်းကိရိယာအနေဖြင့် 4D-shuttle သည် အဓိကအားဖြင့် frame combination၊ လျှပ်စစ်စနစ်၊ ပါဝါထောက်ပံ့မှုစနစ်၊ မောင်းနှင်မှုစနစ်၊ မြှင့်တင်ရေးစနစ်၊ အာရုံခံစနစ် စသည်တို့ဖြင့် ဖွဲ့စည်းထားသည်။ ၎င်းတွင် မုဒ်ငါးခုရှိသည်- အဝေးထိန်းစနစ်၊ လက်စွဲ၊ တစ်ပိုင်းအလိုအလျောက်၊ ဒေသတွင်း အော်တိုနှင့် အွန်လိုင်းအော်တို။ ၎င်းတွင် လုံခြုံရေးကာကွယ်မှုများစွာနှင့် လုံခြုံရေးသတိပေးချက်များ၊ ဒေသတွင်းလုံခြုံရေးအချက်ပေးမှုများ၊ လုပ်ငန်းလည်ပတ်မှုလုံခြုံရေးအချက်ပေးမှုများနှင့် အပြန်အလှန်အကျိုးသက်ရောက်သော လုံခြုံရေးအချက်ပေးမှုများ ပါရှိသည်။ အခွံများကို ဓာတ်ငွေ့ကာကွယ်ထားသော ဂဟေဆက်ခြင်းနှင့် မြင့်မားသောခိုင်ခံ့မှုရှိသော ဘို့များဖြင့် ချိတ်ဆက်ထားသည်။ rack combination သည် နှစ်ထပ်အလွှာဖွဲ့စည်းပုံကို အသုံးပြုသည်။ ပုံပန်းသဏ္ဌာန်အားလုံးသည် spray-painted ဖြစ်ပြီး စက်ပိုင်းဆိုင်ရာအစိတ်အပိုင်းများနှင့် လျှပ်စစ်ကွင်းများကို electroplated လုပ်ထားသည်။ ၎င်းတွင် မောင်းနှင်မှုစနစ်နှစ်စုံနှင့် မြှင့်တင်ရေးစနစ်နှစ်စုံပါရှိသည်။ မောင်းနှင်မှုစနစ်များသည် XY ဦးတည်ရာများကို တာဝန်ယူသည်။ မြှင့်တင်ရေးစနစ်များထဲမှ တစ်ခုမှာ ကုန်ပစ္စည်းများ မြှင့်တင်ခြင်းကို တာဝန်ယူပြီး နောက်တစ်ခုမှာ အဓိကနှင့် ဒုတိယလမ်းကြောင်း၏ switch ကို တာဝန်ယူသည်။ အမြင့် Z ဦးတည်ရာသည် စိတ်ကြိုက်ဓာတ်လှေကားကို အသုံးပြုခြင်းဖြင့် 4D-shuttle ၏ အလွှာပြောင်းလဲမှုကို အကောင်အထည်ဖော်နိုင်သည်။ ထို့ကြောင့် သုံးဖက်မြင်အာကာသ၏ ဝင်ရောက်ခွင့်လုပ်ဆောင်ချက်ကို အကောင်အထည်ဖော်နိုင်မည်ဖြစ်သည်။
လေးလံသော ဝန်အမျိုးအစား၏ဖွဲ့စည်းပုံသည် အခြေခံအားဖြင့် စံဗားရှင်းနှင့် အတူတူပင်ဖြစ်သည်။ အဓိကကွာခြားချက်မှာ ဝန်အားကို များစွာတိုးတက်ကောင်းမွန်စေပြီး သယ်ဆောင်နိုင်စွမ်းသည် စံဗားရှင်းထက် နှစ်ဆနီးပါးရောက်ရှိမည်ဖြစ်သည်။ မြှင့်တင်ယန္တရား၏ ဝန်အားခံဒီဇိုင်းကို ပိုမိုအားကောင်းစေပြီး မြှင့်တင်မော်တာ၏ စွမ်းအားကို တိုးမြှင့်ထားသောကြောင့် ဝန်အားခံနိုင်စွမ်း 2.5T အထိရောက်ရှိနိုင်သည်။ ခရီးသွားမော်တာ၏ စွမ်းအားမှာ မပြောင်းလဲပါ။ အထွက်နှုန်းတိုးမြှင့်ရန်အတွက် လျှော့ချမှုအချိုးကို တိုးမြှင့်ပြီး 4D shuttle ၏ လည်ပတ်မှုအမြန်နှုန်းသည် လိုက်လျောညီထွေစွာ လျော့ကျသွားမည်ဖြစ်သည်။
စံသတ်မှတ်ထားသော စီးပွားရေးလုပ်ငန်း
ပြေစာတပ်ဆင်ခြင်းနှင့် ဂိုဒေါင်ပြင်ပတွင် သိမ်းဆည်းခြင်း
နေရာပြောင်းရွှေ့ခြင်းနှင့် ကုန်ပစ္စည်းစာရင်းကောက်ခံခြင်း ပြောင်းလဲမှုအလွှာ
နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ
| စီမံကိန်း | အခြေခံဒေတာ | မှတ်ချက် | |
| မော်ဒယ် | SX-ZHC-T-၁၂၁၀-၂T | ||
| သက်ဆိုင်သော ဗန်း | အနံ: ၁၂၀၀ မီလီမီတာ အနက်: ၁၀၀၀ မီလီမီတာ | ||
| အများဆုံး ဝန်အား | အများဆုံး ၂၅၀၀ ကီလိုဂရမ် | ||
| အရပ်/အလေးချိန် | ကိုယ်ထည်အမြင့်: ၁၅၀ မီလီမီတာ၊ ရှပ်တာအလေးချိန်: ၃၅၀ ကီလိုဂရမ် | ||
| အဓိက X ဦးတည်ရာကို လျှောက်ခြင်း | မြန်နှုန်း | အများဆုံး ဝန်မရှိချိန်- ၁.၅ မီတာ/စက္ကန့်၊ အများဆုံး ဝန်အပြည့်ချိန်- ၁ .၀ မီတာ/စက္ကန့် | |
| လမ်းလျှောက်အရှိန်မြှင့်ခြင်း | ≤ ၁.၀ မီတာ/စက္ကန့်2 | ||
| မော်တာ | ဘရက်ရှ်မဲ့ဆာဗိုမော်တာ 48VDC 1 5 00W | တင်သွင်းထားသော servo | |
| ဆာဗာဒရိုက်ဘာ | ဘရက်ရှ်မဲ့ ဆာဗိုဒရိုက်ဘာ | တင်သွင်းထားသော servo | |
| Y ဦးတည်ရာအတိုင်း လျှောက်ပါ | မြန်နှုန်း | အများဆုံးဝန်မရှိခြင်း- ၁.၀ မီတာ/စက္ကန့်၊ အများဆုံး ဝန်အပြည့်- ၀.၈ မီတာ/စက္ကန့် | |
| လမ်းလျှောက်အရှိန်မြှင့်ခြင်း | ≤ ၀.၆ မီတာ/စက္ကန့်2 | ||
| မော်တာ | ဘရက်ရှ်မဲ့ဆာဗိုမော်တာ 48VDC 15 00W | တင်သွင်းထားသော servo | |
| ဆာဗာဒရိုက်ဘာ | ဘရက်ရှ်မဲ့ ဆာဗိုဒရိုက်ဘာ | တင်သွင်းထားသော servo | |
| ကုန်တင်ကား သယ်ယူခြင်း | ဂျက်ချသည့်အမြင့် | ၃၀ မီလီမီတာ _ | |
| မော်တာ | ဘရက်ရှ်မဲ့မော်တာ 48VDC 75 0W | တင်သွင်းထားသော servo | |
| အဓိကဂျက်ချခြင်း | ဂျက်ချသည့်အမြင့် | ၃၅ မီလီမီတာ | |
| မော်တာ | ဘရက်ရှ်မဲ့မော်တာ 48VDC 75 0W | တင်သွင်းထားသော servo | |
| အဓိက ချန်နယ်/နေရာချထားမှု နည်းလမ်း | လမ်းလျှောက်နေရာချထားခြင်း- ဘားကုဒ်နေရာချထားခြင်း / လေဆာနေရာချထားခြင်း | ဂျာမနီ P+F/SICK | |
| ဒုတိယချန်နယ်/နေရာချထားမှုနည်းလမ်း | လမ်းလျှောက်နေရာချထားခြင်း- photoelectric + encoder | ဂျာမနီ P+F/SICK | |
| ဗန်းနေရာချထားခြင်း- လေဆာ + ဖိုတိုအီလက်ထရစ် | ဂျာမနီ P+F/SICK | ||
| ထိန်းချုပ်စနစ် | S7-1200 PLC ပရိုဂရမ်ရေးသားနိုင်သော ထိန်းချုပ်ကိရိယာ | ဂျာမနီ SIEMENS | |
| အဝေးထိန်းခလုတ် | အလုပ်လုပ်သောကြိမ်နှုန်း 433MHZ၊ ဆက်သွယ်ရေးအကွာအဝေးအနည်းဆုံး 100 မီတာ | စိတ်ကြိုက်တင်သွင်းပါ | |
| လျှပ်စစ်ဓာတ်အားထုတ်ပေးသောကိရိယာ | လီသီယမ်ဘက်ထရီ | ပြည်တွင်းအရည်အသွေးမြင့် | |
| ဘက်ထရီ ကန့်သတ်ချက်များ | ၄၈ဗို့၊ ၃၀AH၊ အသုံးပြုချိန် ≥ ၆ နာရီ၊ အားသွင်းချိန် ၃ နာရီ၊ အားပြန်သွင်းနိုင်သောအကြိမ်ရေ- ၁၀၀၀ ကြိမ် | ယာဉ်အရွယ်အစားပေါ် မူတည်၍ စွမ်းရည်ကွဲပြားနိုင်သည် | |
| မြန်နှုန်းထိန်းချုပ်မှုနည်းလမ်း | Servo ထိန်းချုပ်မှု၊ အနိမ့်မြန်နှုန်း စဉ်ဆက်မပြတ် torque | ||
| ကန့်လန့်ကာထိန်းချုပ်မှုနည်းလမ်း | WCS အချိန်ဇယားဆွဲခြင်း၊ ထိတွေ့ကွန်ပျူတာထိန်းချုပ်မှု၊ အဝေးထိန်းထိန်းချုပ်မှု | ||
| လည်ပတ်မှုဆူညံသံအဆင့် | ≤60db | ||
| ပန်းချီလိုအပ်ချက်များ | စင်ပေါင်းစပ်မှု (အနက်ရောင်)၊ အပေါ်အဖုံး အနီရောင်၊ ရှေ့နှင့်နောက် အလူမီနီယမ် အဖြူရောင် | ||
| ပတ်ဝန်းကျင်အပူချိန် | အပူချိန်: 0℃~50℃စိုထိုင်းဆ: 5% ~ 95% (ငွေ့ရည်ဖွဲ့ခြင်းမရှိ) | ||



