သတင်းအချက်အလက် 4D လွန်းပျံယာဉ်လိုင်းစနစ်





ကွင်းဆက် conveyor
| စီမံကိန်း | အခြေခံအချက်အလက် | မှတ်ချက် |
| မော်ဒယ် | SX-LTJ-1.0T -600H | |
| မော်တာလျှော့ကိရိယာ | SEW | |
| ဖွဲ့စည်းပုံအမျိုးအစား | ဖရိန်ကို အလူမီနီယမ်အလွိုင်းဖြင့် ပြုလုပ်ထားပြီး ခြေထောက်များနှင့် ကွေးများကို ကာဗွန်သံမဏိဖြင့် ပြုလုပ်ထားသည်။ | |
| ထိန်းချုပ်မှုနည်းလမ်း | လက်ဖြင့် / သီးသန့် / အွန်လိုင်း / အလိုအလျောက်ထိန်းချုပ်မှု | |
| လုံခြုံရေးအစီအမံများ | နှစ်ဖက်စလုံးတွင် လျှပ်စစ်အတားအဆီးများ၊ အကာအကွယ်လမ်းညွှန်များ | |
| စံနှုန်းကိုချမှတ်ပါ။ | JB/T7013-93 | |
| payload | အများဆုံး 1000KG | |
| ကုန်တင်စစ်ဆေးခြင်း။ | Photoelectric အာရုံခံကိရိယာများ | ဖျားသည်/P+F |
| ကွင်းဆက်လမ်းကြောင်း | ပွတ်တိုက်မှုနည်းသော နိုင်လွန်လမ်းကြောင်း | |
| conveyor ကွင်းဆက် | Donghua ကွင်းဆက် | |
| ကျမမှာ | Fukuyama ဟာ့ဒ်ဝဲ၊ အလုံပိတ် Ball Bearings | |
| လွှဲပြောင်းမြန်နှုန်း | 12m/min | |
| Surface Treatment နှင့် Coating | ချဉ်ခြင်း၊ ဖော့စဖိတ်ခြင်း၊ ပက်ဖြန်းခြင်း။ | |
| ဆူညံသံထိန်းချုပ်မှု | ≤73db | |
| မျက်နှာပြင်အပေါ်ယံပိုင်း | ကွန်ပျူတာ မီးခိုးရောင် | ချိတ်တွဲများ |
စက်ပစ္စည်းဖွဲ့စည်းပုံ
conveyor သည် frame၊ outriggers၊ drive unit စသည်တို့ဖြင့် ဖွဲ့စည်းထားသည်။ ဖရိမ်ကို အလူမီနီယမ်အလွိုင်းဖြင့် ပြုလုပ်ထားပြီး အစွန်းနှစ်ဖက်စလုံးသည် သွားများမပါသော ပြောင်းပြန်ဘီးများကို ပြုပြင်ထားသည်။ Conveyor chain သည် pitch P=15.875mm ရှိသော ဖြောင့်တန်းနှစ်တန်းကွင်းဆက်ဖြစ်သည်။ ကွင်းဆက်ပံ့ပိုးမှုအား မြင့်မားသော မော်လီကျူးပိုလီအီသလင်း (UHMW) ဖြင့် ပြုလုပ်ထားပြီး ချောဆီပေးသည့် အာနိသင်ရှိသည်။ ဂဟေဆော်ထားသော outrigger များကို bolt ဖိအားပန်းကန်ဖြင့် ပင်မဘောင်နှင့် ချိတ်ဆက်ထားပြီး၊ M20 ဝက်အူ ချိန်ညှိမှုခြေထောက်များကို မြေပြင်နှင့် ချိတ်ဆက်ထားပြီး သယ်ဆောင်သည့်မျက်နှာပြင်၏ အမြင့်ကို +25mm ဖြင့် ချိန်ညှိနိုင်သည်။ မောင်းနှင်သည့်ကိရိယာတွင် အလယ်တွင် တပ်ဆင်ထားသော အရှိန်လျှော့မော်တာတစ်ခု၊ မောင်းတံတပ်ဆင်မှုတစ်ခု၊ ဂီယာစပရက်ကတ်တစ်ခု၊ မော်တာထိုင်ခုံနှင့် ကွင်းဆက်တင်းကျပ်သည့်ကိရိယာ၊ နှင့် ဝက်အူအမျိုးအစား ချိန်ညှိတင်းမာမှု စက်သီးသည် သယ်ယူပို့ဆောင်ရေးကွင်းဆက်ကို တင်းမာစေသည်။
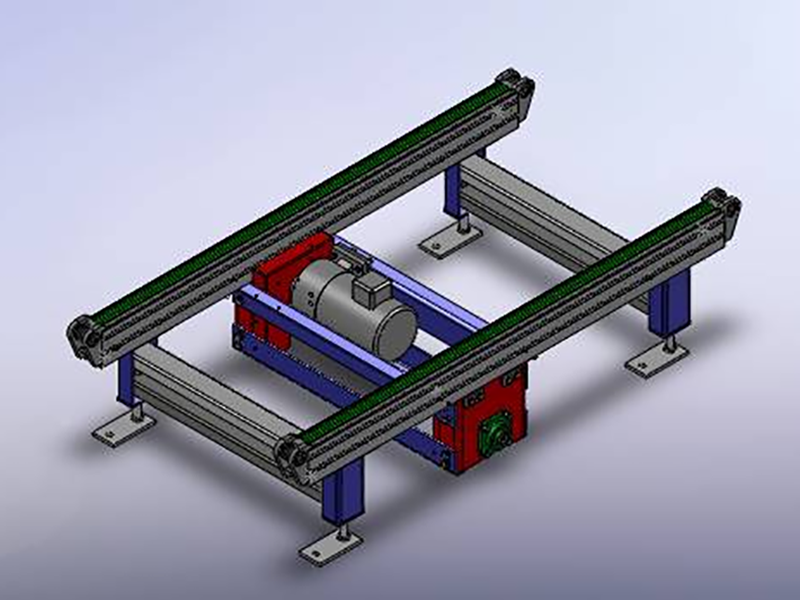
အလုပ်သဘော၊
မော်တာသည် ဂီယာအုပ်စုမှတဆင့် drive shaft ကို မောင်းနှင်ပြီး pallet ၏ conveying function ကို သိရှိရန် drive shaft သည် conveying chain ကို drive ပေးပါသည်။
Roller conveyor
| ကုသိုလ်ကံ | အခြေခံအချက်အလက် | ပြီလေ။ |
| မော်ဒယ် | SX-GTJ-1.0T -600H | သံမဏိဖွဲ့စည်းပုံ |
| မော်တာလျှော့ကိရိယာ | SEW | |
| ဖွဲ့စည်းပုံအမျိုးအစား | ကာဗွန်သံမဏိကွေး | |
| ထိန်းချုပ်မှုနည်းလမ်း | လက်ဖြင့် / သီးသန့် / အွန်လိုင်း / အလိုအလျောက်ထိန်းချုပ်မှု | |
| payload | အများဆုံး 1000KG | |
| လွှဲပြောင်းမြန်နှုန်း | 12m/min | |
| ကြိတ်စက် | 76 နှစ်ထပ်ကွင်းဆက်ဒလိမ့်တုံး | |
| ကွင်းဆက်နှင် | Huadong Chain စက်ရုံ | |
| ကျမမှာ | Ha ဝင်ရိုး | |
| Surface Treatment နှင့် Coating | ချဉ်ခြင်း၊ ဖော့စဖိတ်ခြင်း၊ ပက်ဖြန်းခြင်း။ | |
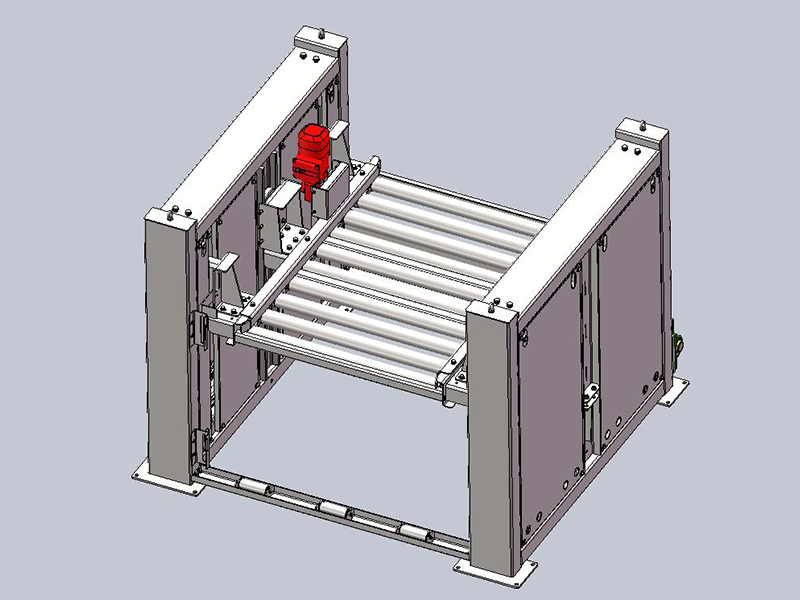
စက်ပစ္စည်းဖွဲ့စည်းပုံ
စက်ပစ္စည်းဖွဲ့စည်းပုံ- ကြိတ်စက်စားပွဲတင်စက်ကို ဖရိန်တစ်ခု၊ အထွက်ပေါက်များ၊ ကြိတ်စက်များ၊ ဒရိုက်များနှင့် အခြားယူနစ်များဖြင့် ဖွဲ့စည်းထားသည်။ ကြိတ်စက် φ76x3 တစ်ဖက်မှ နှစ်ထပ်စပကတ် သွပ်ရည်စိမ်ထားသော ဒလိမ့်တုံး၊ ကြိတ်စက်အကွာ P=174.5 မီလီမီတာ၊ တစ်ဖက်ခြမ်း နှစ်ထပ်စပကတ်။ ဂဟေဆော်ထားသော outrigger များကို bolt ဖိအားပန်းကန်ဖြင့် ပင်မဘောင်နှင့် ချိတ်ဆက်ထားပြီး၊ M20 ဝက်အူ ချိန်ညှိမှုခြေထောက်များကို မြေပြင်နှင့် ချိတ်ဆက်ထားပြီး သယ်ဆောင်သည့်မျက်နှာပြင်၏ အမြင့်ကို +25mm ဖြင့် ချိန်ညှိနိုင်သည်။ မောင်းနှင်သည့်ကိရိယာတွင် အလယ်တွင် တပ်ဆင်ထားသော အရှိန်လျှော့မော်တာတစ်ခု၊ ဂီယာစပီကတ်တစ်ခု၊ မော်တာထိုင်ခုံနှင့် ကွင်းဆက်တင်းကျပ်သည့်ကိရိယာတို့ ပါဝင်သည်။
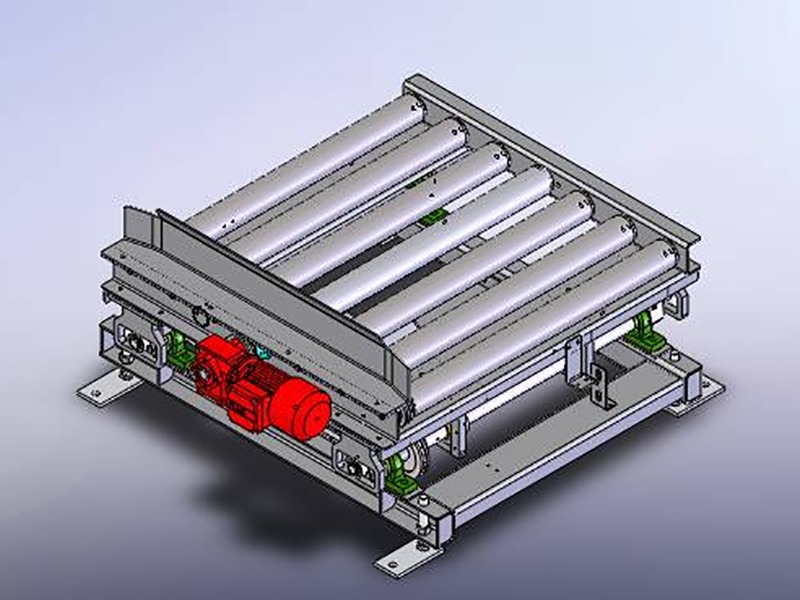
အလုပ်လုပ်ခြင်းသဘောတရား- မော်တာသည် ရိုလာကို ကွင်းဆက်မှတဆင့် မောင်းနှင်ပေးပြီး၊ ဒလိမ့်တုံးကို ကပ်လျက်ရှိသော ဒလိမ့်တုံးမှတဆင့် အခြားကွင်းဆက်တစ်ခုသို့ ပို့ကာ၊ conveyor ၏ သယ်ဆောင်ခြင်းလုပ်ငန်းကို နားလည်ရန် အခြား roller သို့ ပို့ဆောင်သည်။
Jacking နှင့်လွှဲပြောင်းစက်
| စီမံကိန်း | အခြေခံအချက်အလက် | မှတ်ချက် |
| မော်ဒယ် | SX-YZJ-1.0T-6 0 0H | သံမဏိဖွဲ့စည်းပုံ |
| မော်တာလျှော့ကိရိယာ | SEW | |
| ဖွဲ့စည်းပုံအမျိုးအစား | ကာဗွန်သံမဏိကွေး | |
| ထိန်းချုပ်မှုနည်းလမ်း | လက်ဖြင့် / သီးသန့် / အွန်လိုင်း / အလိုအလျောက်ထိန်းချုပ်မှု | |
| လုံခြုံရေးအစီအမံများ | နှစ်ဖက်စလုံးတွင် လျှပ်စစ်အတားအဆီးများ၊ အကာအကွယ်လမ်းညွှန်များ | |
| စံ | JB/T7013-93 | |
| payload | အများဆုံး 1000KG | |
| ကုန်တင်စစ်ဆေးခြင်း။ | Photoelectric အာရုံခံကိရိယာများ | ဖျားသည်/P+F |
| ကြိတ်စက် | 76 နှစ်ထပ်ကွင်းဆက်ဒလိမ့်တုံး | |
| ဝက်ဝံများနှင့် အိမ်ရာများ | ဝက်ဝံ- Harbin ရိုးတံ; အသီးအနှံထိုင်ခုံ- Fushan FSB | |
| လွှဲပြောင်းမြန်နှုန်း | 12m/min | |
| Surface Treatment နှင့် Coating | ချဉ်ခြင်း၊ ဖော့စဖိတ်ခြင်း၊ ပက်ဖြန်းခြင်း။ | |
| ဆူညံသံထိန်းချုပ်မှု | ≤73dB | |
| မျက်နှာပြင်အပေါ်ယံပိုင်း | ကွန်ပျူတာ မီးခိုးရောင် | ချိတ်တွဲများ |
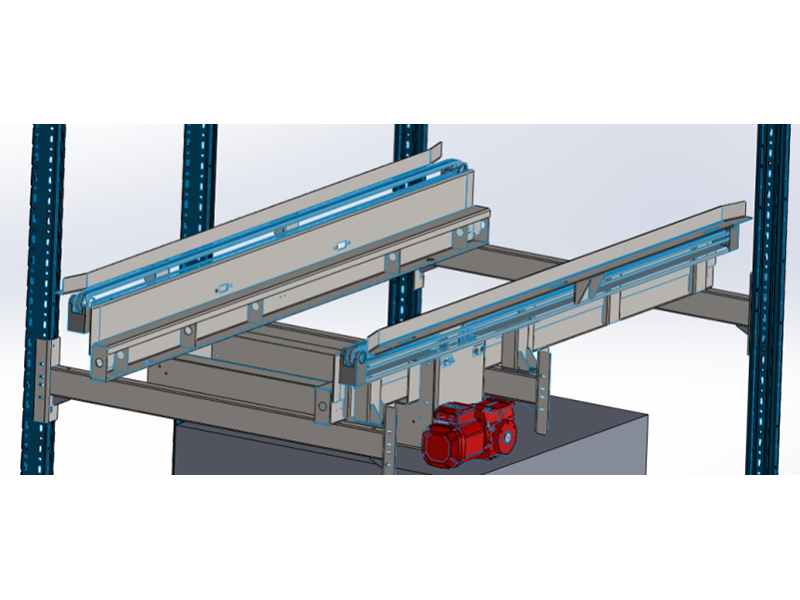
စက်ပစ္စည်းဖွဲ့စည်းပုံ
စက်ပစ္စည်းဖွဲ့စည်းပုံ- Roller လွှဲပြောင်းစက်သည် သယ်ဆောင်သည့်အစိတ်အပိုင်းများ၊ ရုတ်သိမ်းခြင်းယန္တရားများ၊ လမ်းညွှန်အစိတ်အပိုင်းများနှင့် အခြားယူနစ်များဖြင့် ဖွဲ့စည်းထားသည်။ မျက်နှာပြင်အမြင့် ချိန်ညှိမှု +25mm ကို သယ်ဆောင်ခြင်း။ lifting ယန္တရားသည် မော်တာ-မောင်းနှင်သော crank arm ၏မူကို လက်ခံထားပြီး မောင်းနှင်သည့်ကိရိယာကို အလယ်တွင် တပ်ဆင်ထားသော လျှော့ချမော်တာတစ်ခု၊ ဂီယာစပကတ်တစ်ခု၊ မော်တာထိုင်ခုံနှင့် ကွင်းဆက်တင်းနစ်ကိရိယာတစ်ခုတို့ ပါဝင်ပါသည်။
အလုပ်လုပ်ခြင်းနိယာမ- Pallet အား ကိုက်ညီသော conveyor ဖြင့် စက်ပစ္စည်းများသို့ ပို့ဆောင်သောအခါ၊ jacking motor သည် လည်ပတ်ပြီး pallet ကို မြှောက်ရန် cam ယန္တရားကို မောင်းနှင်ပြီး jacking motor သည် နေရာယူသည့်အခါ ရပ်သွားပါသည်။ သယ်ဆောင်ခြင်းမော်တာစတင်သည်၊ ပျဉ်ပြားကို docking ကိရိယာများသို့ပို့ဆောင်သည်၊ မော်တာရပ်တန့်သည်၊ ဂျိုက်မော်တာလည်ပတ်သည်၊ ကိရိယာကိုလျှော့ချရန် cam ယန္တရားကိုမောင်းနှင်သည်၊ ထို့နောက်နေရာရှိသောအခါ၊ jacking မော်တာသည်အလုပ်လည်ပတ်မှုလည်ပတ်ရန်ရပ်တန့်သွားသည်။
Transition Conveyor
| ၁) ပရောဂျက် | အခြေခံအချက်အလက် | မှတ်ချက် |
| မော်ဒယ် | SX-GDLTJ-1.0T-500H-1.6L | |
| မော်တာလျှော့ကိရိယာ | SEW | |
| ဖွဲ့စည်းပုံအမျိုးအစား | ခြေထောက်တွေကို ကာဗွန်စတီးလ်နဲ့ ကွေးလိုက်ပါ။ | |
| ထိန်းချုပ်မှုနည်းလမ်း | လက်ဖြင့် / သီးသန့် / အွန်လိုင်း / အလိုအလျောက်ထိန်းချုပ်မှု | |
| လုံခြုံရေးအစီအမံများ | နှစ်ဖက်စလုံးတွင် လျှပ်စစ်အတားအဆီးများ၊ အကာအကွယ်လမ်းညွှန်များ | |
| စံ | JB/T7013-93 | |
| payload | အများဆုံး 1000KG | |
| ကုန်တင်စစ်ဆေးခြင်း။ | Photoelectric အာရုံခံကိရိယာများ | ဖျားသည်/P+F |
| ကွင်းဆက်လမ်းကြောင်း | ပွတ်တိုက်မှုနည်းသော နိုင်လွန်လမ်းကြောင်း | |
| conveyor ကွင်းဆက် | Donghua ကွင်းဆက် | |
| ဝက်ဝံများနှင့် အိမ်ရာများ | ဝက်ဝံ- ဟာဘင်ရိုးတံ၊ ဝက်ဝံထိုင်ခုံ- Fukuyama FSB | |
| လွှဲပြောင်းမြန်နှုန်း | 12m/min | |
| Surface Treatment နှင့် Coating | ချဉ်ခြင်း၊ ဖော့စဖိတ်ခြင်း၊ ပက်ဖြန်းခြင်း။ | |
| ဆူညံသံထိန်းချုပ်မှု | ≤73dB | |
| မျက်နှာပြင်အပေါ်ယံပိုင်း | ကွန်ပျူတာ မီးခိုးရောင် | ချိတ်တွဲများ |
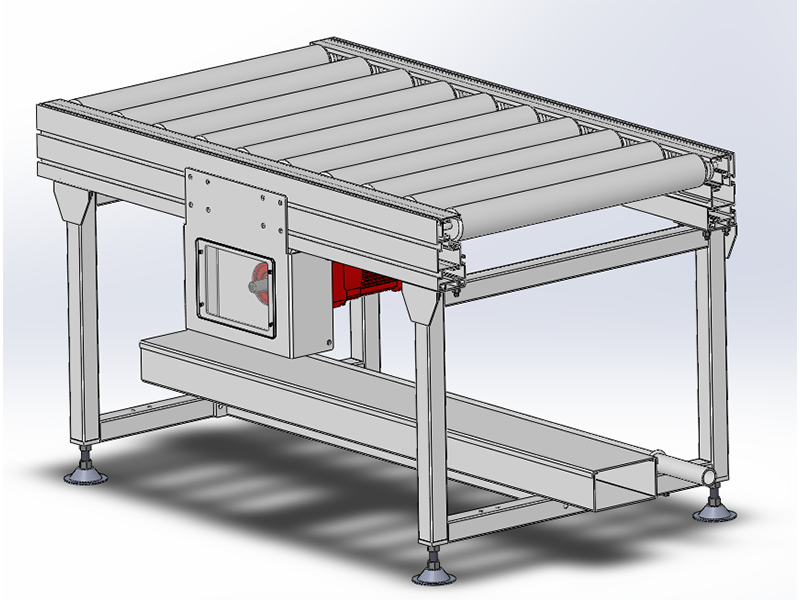
စက်ပစ္စည်းဖွဲ့စည်းပုံ
စက်ပစ္စည်းဖွဲ့စည်းပုံ- ဤကိရိယာကို လွှင့်ထူနှင့် စင်ကြားရှိ ပူးတွဲတွင် အသုံးပြုထားပြီး သယ်ယူသူကို ဖရိန်၊ အထွက်နှင့် ဒရိုက်ယူနစ်ဖြင့် ဖွဲ့စည်းထားသည်။ Conveyor chain သည် pitch P=15.875mm ရှိသော ဖြောင့်တန်းနှစ်တန်းကွင်းဆက်ဖြစ်သည်။ ကွင်းဆက်ပံ့ပိုးမှုအား မြင့်မားသော မော်လီကျူးပိုလီအီသလင်း (UHMW) ဖြင့် ပြုလုပ်ထားပြီး ချောဆီပေးသည့် အာနိသင်ရှိသည်။ ခြေထောက်များကို စင်ကိုယ်ထည်နှင့် ချိတ်ဆက်ထားသည်။ မောင်းနှင်သည့် ကိရိယာတွင် အလယ်တွင် တပ်ဆင်ထားသော အရှိန်လျှော့မော်တာ၊ မောင်းရိုးတံ တပ်ဆင်မှု၊ ဂီယာစပကတ်တစ်ခု၊ မော်တာထိုင်ခုံနှင့် ကွင်းဆက်တင်းကျပ်သည့် ကိရိယာနှင့် ဝက်အူအမျိုးအစား ချိန်ညှိခြင်း တင်းမာမှုတို့သည် သယ်ယူပို့ဆောင်ရေးကွင်းဆက်ကို တင်းမာစေသည်။
အလုပ်လုပ်ခြင်းနိယာမ : မော်တာသည် ဂီယာအုပ်စုမှတဆင့် drive shaft ကို မောင်းနှင်ပြီး ၊ drive shaft သည် pallet ၏ conveying function ကို သိရှိနားလည်စေရန် conveying chain ကို drive ပေးပါသည်။
ကြမ်းပြင်ဓာတ်လှေကား
| စီမံကိန်း | အခြေခံအချက်အလက် | မှတ်ချက် |
| မော်ဒယ် | LDTSJ-1.0T-700H | သံမဏိဖွဲ့စည်းပုံ |
| မော်တာလျှော့ကိရိယာ | SEW | |
| ဖွဲ့စည်းပုံအမျိုးအစား | ကော်လံ- ကာဗွန်သံမဏိကို ကွေးညွှတ်ထားသည့် အပြင်ဘက်ခြမ်း- စတီးပြားတံဆိပ် | |
| ထိန်းချုပ်မှုနည်းလမ်း | လက်ဖြင့် / သီးသန့် / အွန်လိုင်း / အလိုအလျောက်ထိန်းချုပ်မှု | |
| လုံခြုံရေးအစီအမံများ | လျှပ်စစ်ကြားဖြတ်၊ ပြုတ်ကျခြင်းကိုဖမ်းဆီးသောကိရိယာ | |
| စံ | JB/T7013-93 | |
| payload | အများဆုံး 1000KG | |
| ကုန်တင်စစ်ဆေးခြင်း။ | Photoelectric အာရုံခံကိရိယာများ | ဖျားသည်/P+F |
| ကြိတ်စက် | 76 နှစ်ထပ်ကွင်းဆက်ဒလိမ့်တုံး | |
| lifting chain | Donghua ကွင်းဆက် | |
| ကျမမှာ | အထွေထွေ ဝက်ဝံများ- Harbin shaft သော့ဝက်ဝံများ- NSK | |
| ပြေးနှုန်း | သယ်ဆောင်မှုအမြန်နှုန်း- 16m/min၊ သယ်ဆောင်မှုအမြန်နှုန်း- 6m/min | |
| Surface Treatment နှင့် Coating | ချဉ်ခြင်း၊ ဖော့စဖိတ်ခြင်း၊ ပက်ဖြန်းခြင်း။ | |
| ဆူညံသံထိန်းချုပ်မှု | ≤73dB | |
| မျက်နှာပြင်အပေါ်ယံပိုင်း | ကွန်ပျူတာ မီးခိုးရောင် | ချိတ်တွဲများ |
အဓိကဖွဲ့စည်းပုံနှင့်အင်္ဂါရပ်များ
ဖရိမ်- 5mm ကာဗွန်သံမဏိကွေးပန်းကန်ပြားကို ကော်လံအဖြစ်အသုံးပြုပြီး ပြင်ပကို သံမဏိပြားဖြင့် အလုံပိတ်၊
ရုတ်သိမ်းခြင်းအပိုင်း-
lifting frame ကို hoist ၏ထိပ်တွင်တပ်ဆင်ထားပြီး၊ frame ကိုကာဗွန်သံမဏိဖြင့်ပြုလုပ်ထားပြီး၊ lifting motor သည် lifting sprocket assembly ကိုကွင်းဆက်မှတဆင့်အလုပ်လုပ်စေရန်မောင်းနှင်သည်။
ပလက်ဖောင်းကို ဖွင့်နေသည်-
ကာဗွန်သံမဏိနဲ့ ပြုလုပ်ထားပါတယ်။ loading platform တွင် standard conveyor တပ်ဆင်ထားပါသည်။
အလုပ်သဘော၊
lifting motor သည် lifting work ကို အပြီးသတ်ရန် loading platform ကို မောင်းနှင်သည်၊ loading platform ပေါ်ရှိ conveyor သည် ကုန်ပစ္စည်းများကို ဓာတ်လှေကားအတွင်း ချောမွေ့စွာ ဝင်ထွက်နိုင်စေပါသည်။



